PALRO は、電力や熱、ネットワークなど、自分にとって大切な機能について
常に状況判断と予測を行っています。
状態を知るための自己判断
PALRO は快適に稼動できる状態を保つために、毎起動時にセンサーやアクチュエーター
との通信状態、ストレージの空き容量、ネットワークの接続状態、ソフトウェアの動作状態※や
バージョンなどを自己診断し、その結果や最新ソフトウェアのアップデートなどのトピックスを
わかりやすく声に出して伝えます。
※万が一、稼動中にソフトウェアの動作が不安定になった場合は、可能な限り自動的に修復と復旧を行います。
エネルギーのもと、バッテリー

省電力
必要がないと判断すると、その関連部分の電源を
省電力モードにして快適な動作状況をつくります。
バッテリーテクノロジー
PALRO はセンサーを内蔵したバッテリーパックを搭載しています。
内蔵されたセンサーは、残量や温度などのバッテリー内部の状態を
常時 PALRO に伝えています。
PALRO は、この情報をもとにバッテリーの充電制御を行います。
また、外部電源の供給状態、バッテリーの残量、温度などをもとに、
安全に配慮した適切な行動をします。
PALRO 自身とユーザーへの安全配慮
PALRO には転倒による破損を回避するさまざまな機能を搭載しています。
歩行中に机の端に到達したり、障害物を検知した際には、危険と判断して停止します。
何らかの原因でやむなく転倒した時には、瞬時に受身の姿勢をとって破損を回避します。
また、指はさみ防止など、ユーザーの安全にも配慮しています。
|
クリフセンサー |
トーセンサー |

破損回避
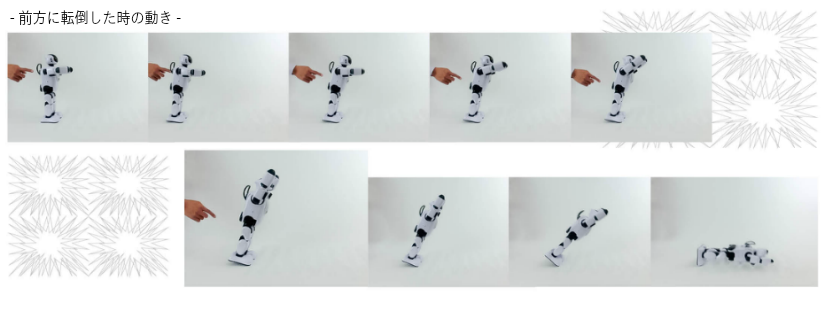
必要以上の力が加わり、転倒を余儀なくされたと判断したときは、加速度を計算し受身の体制をとります。
前方に転倒する場合は、腕の破損を防ぐため、腕が地面に衝突しないように瞬時に上または下に動かします。
衝撃を吸収するためにクッション構造になっている胸部を、体を伸ばし着地面として集中させます。
後方に転倒する場合は、背中のバックプロテクターが衝撃を吸収します。
【ご注意】PALRO の「転倒回避」及び転倒による「破損回避」プログラムは、PALRO を安全に使用することを補助するものであり、あらゆる状況での転倒回避及び転倒による破損回避をするものではありません。システムの能力には限界があり、周囲の環境や床の状況などによっては充分に作動しないことがあります。 PALRO ユーザーの方は周囲の環境や床の状況に合わせ、安全にご使用ください。