PALRO は、2本足で歩きます。そして方向転換、ダンスも。
複雑なメカニズムと高度な制御技術が人間のように 2本足で歩き、動くことを可能にしました。
動歩行テクノロジー
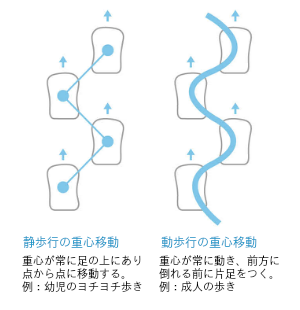 人と同じように 2足歩行を行う PALRO は、重心が常に前方に向かって移動し続ける
人と同じように 2足歩行を行う PALRO は、重心が常に前方に向かって移動し続ける
動歩行、姿勢を制御する倒立振子モデルを組み合わせています。
動歩行は、重力と重心移動の関係、前後左右のバランス、背丈、体重、動力、加速度…
など、さまざまな要素を絶妙に組み合わせて、はじめて可能になります。
全長約 40cm、質量約 1.8kg、重心位置が足裏から約 24cm の高さにある PALRO は、
胴体内のジャイロ・加速度などの姿勢センサー、足裏の圧力センサーなどからの情報を
加味して解析し、きめ細かく姿勢を制御することで、路面変化や外乱にも対応できる
安定した動歩行を実現します。
また、動歩行は慣性を有効活用するため、比較的小さな力で歩き続けることができます。
小型、軽量なアクチュエーターの採用により、歩行時の省電力化も実現しました。
衝撃を逃がすこと
 PALROが歩くときには、2kg近い身体の重さが
PALROが歩くときには、2kg近い身体の重さが
着地の際に片足にかかり、その衝撃は 70kgにも相当します。
PALROは衝撃を吸収するため、歩行中に 0.01秒の精度で
足の関節の柔らかさを変更しています。
離陸するときはパワーが必要なので固く、
着地するときは衝撃を逃がすために柔らかくしています。
また、固体に運動エネルギーがかかった時に起こる
素材自体の微妙なねじれも吸収しています。
PALROの静かな足音は、
この衝撃を逃すメカニズムによって実現できています。