Combining software and mechanisms
to share and accommodate fluctuations in movement
In theory, an ideal mechanism can be controlled using software based on
theoretical calculations that work on the assumption that the
mechanism is rigid.
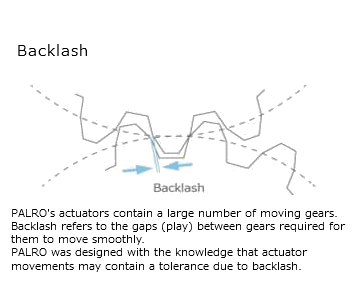
In practice, backlash, the frame bending, sensor tolerance, friction
in drives, actuator durability, power consumption, heat generation and
other issues mean that it does not always move as expected.
After making countless attempts, we finally succeeded by using
fluctuations in movement to our advantage to develop a robot
that does not fall over.
Calibration
PALRO is able to live up to your performance expectations as we account for diff erences in individual parts and assembly.
Each PALRO is individually calibrated for optimal performance when it is assembled. This allows PALRO to stand up straight away.
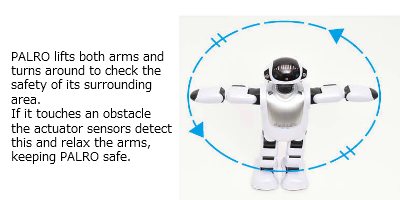
Detecting posture and wobbling
When PALRO has been optimally calibrated, it can correctly detect wobbling, correctly calculate its position,
and control its posture so it does not fall over.
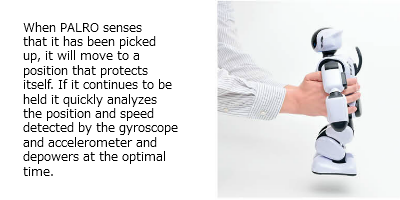
PALRO knows when it will reach a point where posture control will not help,
and moves to protect itself.
When you pick PALRO up it stops moving, and if you lay it on its side it will
ask you to stand it up.
Heat and power consumption
PALRO predicts subsequent actions, and depowers any actuators it has
decided it will not need, even if only for a second.
Depowering the actuators means PALRO consumes less power and generates less heat.