Our lives are now full of AI devices. There are too many to count, from air conditioners to rice cookers, TVs, and cars. The intelligent technology used to create this AI is continuously evolving to make our lives
easier and more convenient.
At FUJISOFT we took our first step in jointly developing robot technology (RT), a branch of intelligent technology, with prominent universities and laboratories in Japan in October 2008.
We started working in RT with a plan to create an RT platform for home appliance manufacturers. While doing this the development team suddenly realized something.
At the time progress in RT focused on improving the speed and precision of feedback control when something happened.
The team wondered if there was some technology that could predict what would happen and control it preemptively.
Attempting feedforward control
One of the most common things we do where we predict what will happen and take preemptive action is communication.
We already had the program resources such as databases, a company specialty, and voice and face recognition that are considered necessary in order to talk to robots.
We also had experts in engineering.
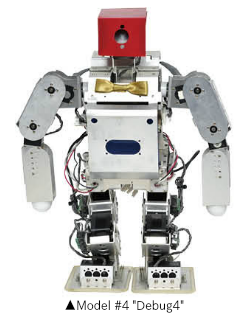
So we started development with the aim of making a humanoid robot. After a lot of trial and error, we completed Model #1.
We had made a robot with sound logic.
If you input a walk command, after a short gap it would start slowly shuffling along.
When the "Listening" lamp was lit, if you said "Hello" it would say "Hello" back. But was this really communication? It was still very far from the real thing.
The development team went back to the start and used the results of their research until that point to start to seriously try to find out what communication is, and how humans are constructed.
You can compare conversations to playing catch. When playing catch you throw the ball, and the other person catches it and repeats the process.
But try thinking about it in more depth. You expect a 7 year old to throw arced, easy-to-catch balls, but if your opponent was a 12 year old wearing a baseball uniform you would prepare yourself and take it more seriously.
These small actions actually contain a lot of hints.
Our subconscious uses our many experiences to take action against what it thinks may happen.
The foundation blocks of natural communication are things we do without thinking, like looking at someone when they are talking, nodding, and not staring at the other person.
Deciding the direction of the project
We wanted to make a robot that could make predictions like people do. In other words, that used the idea of feedforward control. If we continued to pursue increased feedback accuracy we would only be making improvements, and not creating communication. The key was to instantly calculate the possibilities of what might happen next and prepare. Of course, we did not expect this to be easy.
It is hard to believe how many attempts we made. We incorporated the massive amounts of data we generated into threshold values.
We kept persisting, and carried on working hard day after day.
At the same time we started working on the external design. Our concept was to create a design that would appeal to everyone. Appearance is one of the most important parts of communication.
Humans have a maternal instinct to hold out their hands to stop small round things from falling over. The female members of the development team took center stage, and we were able to find a design that was
unintimidating, one that you would want to reach out and stroke.
We named the robot we designed PALRO.
The idea of hybrid AI
One of the basic rules of polite conversation is to look at the other person when talking. If the other person turns away or looks at something else it can make you feel uneasy.
Making a robot continue to look at a face is more diffi cult than you might think. This is because people do not stop moving. In 0.3 seconds they can move a whole head's width to the side. In an instant the robot loses track of the face and starts looking around.
In order to continue looking at a face it has recognized, we made the robot refresh data in 0.2 seconds (since reduced to 0.04 seconds). However this cannot be processed using the cloud. There is too high a risk of disturbance.
So to make PALRO communicate like a person, we put a high-spec CPU in the robot itself, and decided to use cloud AI for complicated analysis, interpretation and arithmetic processing of words and data.
In other words, we developed a system that operates using a hybrid structure combining front-end AI and cloud AI.
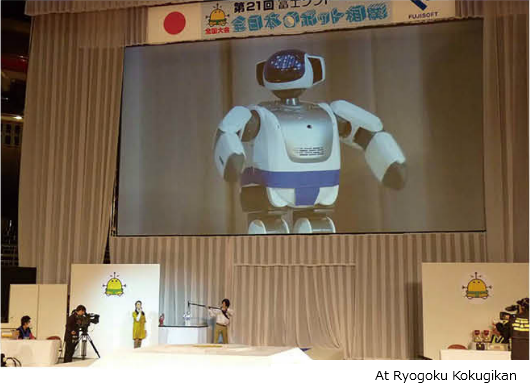
Unveiling PALRO in December, 2009
PALRO did the ceremonial leg raising and stomping that sumo wrestlers do in front of a large number of people at the 21st All-Japan
Robot Sumo Tournament held by FUJISOFT, to great acclaim.
Until the event PALRO had not yet done this successfully, but a miracle happened on the day.
Starting work with industry, government and academia
In February 2010 we started selling our PALRO Academic Series, designed for use in research and development by universities and other research facilities. We made it open source to encourage development, and many different applications were developed.
The development team also continued to improve product quality by repeatedly aging and testing it. Then we started demonstration experiments for care facilities together with universities and other research facilities.
Here, PALRO met normal people for the first time.
On the first day, PALRO said "Good morning" to an old lady standing in front of it. The senior citizens nearby all suddenly gathered around, talking about how cute it was.
The members of the development team can remember being deeply moved.
Releasing the Business Series
After conducting many demonstration tests with research facilities, including governmental ones, we started selling the PALRO Business Series for business to business usage in 2012.
PALRO was adopted by many care related facilities across the country.
In 2013 PALRO started being used even more widely when it was picked to be used in demonstration tests in Robot Town Sagami in Kanagawa Prefecture.
We want PALRO to be a robot who cares
Caring people use a similar type of logic to feedforward control. They anticipate what will happen and prepare for it.
PALRO has been developed with the aim of helping people in all of its actions when communicating.
We will continue to improve on PALRO until it can help people and be seen as a robot who cares.
![]()
October Started developing intelligent technology
![]()
December Unveiling at the 21st All-Japan Robot Sumo Tournament
![]()
February Humanoid Robot PALRO press release
February First PALRO Academic Series shipped
May Exhibited at Expo 2010 Shanghai China
![]()
April Started market research at senior care facilities
![]()
July Started selling Communication Robot PALRO Business Series
![]()
August ●Priority project "Communication partner robot for senior citizens including those with dementia at care facilities" started
October ●2013 public "Robot Demonstration Test Support" "Conversational robot that can be used to maintain and improve the physical condition of senior citizens" project started
December ●2013 public "Robot Demonstration Test Support" "Robot partner that can be used in the rehabilitation and care of senior citizens with dementia" project started
![]()
July The Robot Town Sagami joint council applied to the Ministry of Health, Labour and Welfare for nursing insurance coverage for five lifestyle support robots including PALRO
October ●Priority "Communication robot for senior citizens including those with dementia at care facilities" project started (project to test the efficacy of an exercise program to prevent falling and improve strength using a communication robot)
November ●Priority "Communication robot for senior citizens including those with dementia at care facilities"
project started (project to test the efficacy of longterm adoption of communication robots in private nursing homes)
December ●2014 public "Robot Demonstration Test Support" "Health support system for senior citizens using communication robots" project started
December ●2014 public "Robot Demonstration Test Support" "Communication robot that can be used in preventative care for senior citizens" project started
![]()
May Started selling Communication Robot Palmi
December Recognized as a Robot Town Sagami product
December Started selling/renting out PALRO Business Series Model II, aimed at senior care facilities
![]()
January ●2015 public "Robot Demonstration Test Support" "Robot partner" project started
April PALRO appeared live on an NHK program about artificial intelligence (AI)
Events marked with ● are priority programs and activities for Robot Town Sagami