PALRO walks on two legs. It can also change direction and even dance.
PALRO's complicated mechanisms and superb control technology allow it to walk and
move on two legs like a person.
Dynamic walking technology
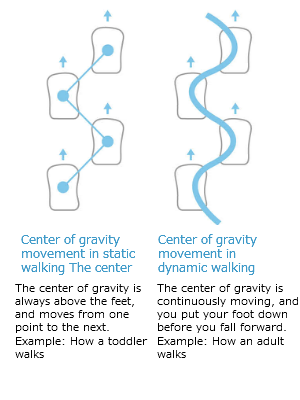 PALRO's inverted pendulum model controls its posture, and always keeps the center of gravity moving forward to create a dynamic walk.
PALRO's inverted pendulum model controls its posture, and always keeps the center of gravity moving forward to create a dynamic walk.
Dynamic walking is only possible when many elements, including the relationship
between gravity and shifts in the center of gravity, balance in all directions, height,
weight, movement and acceleration are perfectly combined.
PALRO is 40 cm tall, weighs 1.8 kg, and has a center of gravity located 24 cm above its feet. It uses information from the gyroscope, accelerometer and other posture sensors in its body, and pressure sensors in its feet to meticulously control its position, and is able to walk securely and navigate changes in walking surface and disturbances.
PALRO also uses inertia effi ciently to continue walking using a relatively small amount of power. We were also able to save energy when walking by using small, light actuators.
Managing impacts and shocks
 When PALRO walks, its weight of almost 2 kg is concentrated on one leg when it hits the ground, and this impact is equivalent to 70 kg.
When PALRO walks, its weight of almost 2 kg is concentrated on one leg when it hits the ground, and this impact is equivalent to 70 kg.
PALRO changes how soft its joints are when walking in just 0.01 seconds so it can absorb these shocks.
When the foot leaves the ground it needs power, so the joints stiffen, and when it touches the ground again they soften to absorb the impact.
PALRO also absorbs the small amount of torsion that occurs when its solid body is subjected to kinetic energy.
PALRO can walk quietly because of these mechanisms that absorb impacts.